视觉导航论文阅读 Posted on 2020-08-23 工业场景:由反射材料组成、无明显纹理特征,基于特征点的方法通常不适用 1. Architecture and Tracking Algorithms for a Distributed Mobile Industrial AR System(2007年) 分布式移动工业AR系统的体系结构和跟踪算法 overview 完成3D实时配准、跟踪 轻量级移动前端 + 后端计算服务器(利用WLAN连接) registration problem Read more »
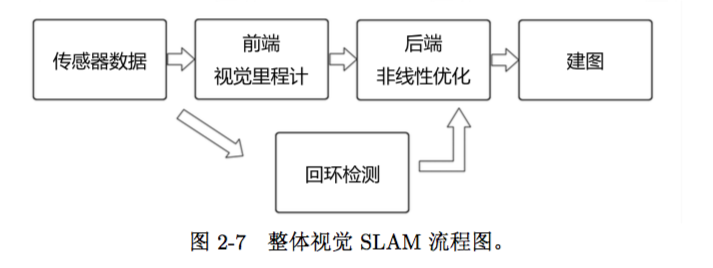
视觉slam十四讲 Posted on 2020-08-10 一. SLAM框架 1. 视觉里程计(Visual Odometry, VO) 估算相邻图像间相机的运动 + 局部地图的样子 涉及图像的特征提取与匹配等(计算机视觉) 只计算相邻时刻,出现累计漂移(Accumulating Drift) Read more »
illumination correction(显微镜光照校正) Posted on 2020-04-12 平场参考方法 收集平场参考图像(白色参考图像),每张图像减去该参考图像 然后对结果图像进行归一化即可完成简单的校正 去除CCD暗电流的影响 Read more »
preprocessing(图像预处理) Posted on 2020-04-12 denoising(去噪) 受环境、传输通道等因素的影响,图像在采集、压缩和传输过程中不可避免地受到噪声的污染,导致图像信息失真和丢失。 噪声、边缘和纹理均为高频信息,难以区分,去噪后易丢失一些细节信息 去噪目的:减少图像中的噪声,同时最大程度地减少原始特征的损失并提高信噪比(SNR) Read more »