notes
- 地心惯性系(i):原点为地心,基准平面是历元J2000.0时的地球平赤道面。X轴指向此历元时的平春分点方向;Z轴指向平北极;y轴由右手定则确定。该坐标系用于描述航天器的轨道状态及绝对姿态。
- 轨道坐标系(o):原点在轨道上与航天器质心重合,Z轴指向地心,Y轴与轨道平面垂直,X按右手法则指向飞行方向。主星轨道坐标系为基准坐标系。
- 本体坐标系(b):原点与航天器的质心重合,三条正交的本体坐标轴分别与星体的本体特征轴平行。俯仰角(pitch),偏航角(yaw),翻滚角(roll)。姿态为0时,本体坐标系与轨道坐标系重合。
- RVD:rendezvous & docking 交会对接
- VBN:vision-based navigation
- ATV:automated transfer vehicle 自动运载飞船
- LoS:Line of Sight
- CDGPS:Carrier Phase Differential GPS
- ISS:International Space Station
- 横向控制:根据上层运动规划输出的路径、曲率等信息进行跟踪控制,以减少跟踪误差,同时保证稳定性。
Highlights
- 系统由camera + LED组成,对接时导航精度优于1mm
- 线性旋转-平移耦合动力学系统(coupled dynamics)
- 可同时优化旋转和平移
- 对运动和传感器噪声不确定性均具备鲁棒性
Abstract
- 适用于立方星的交会、对接导航方案
- 为什么应用VBN:
- 通过对ESA自动运载飞船GCN和俄罗斯对接系统的分析,得出两颗立方星的对接需要大约1cm的横向控制性能
- 近距离时,视距限制和多径效应影响GNSS的测量,无法使用GNSS
- GNSS的限制和对高控制精度的需求,交会、对接过程中最后10m使用视觉传感器
- 硬件系统组成:卫星上单目相机 + 目标上的成组LEDs
- 算法优势:
- 测量方程可将旋转和平移分开,在对接时导航性能优于1mm
- 测量方程可求得解析解,提供可分析的导航方案
- 改方案可用于监视导航滤波,确保其稳定性,为自主交会对接增加保障
- 导航滤波初始化
- 实验证明,该方案能区分LED信号和太阳反射
Introduction
Methods
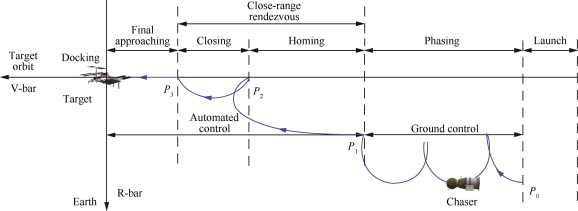
RVD
- 俄罗斯:RF-sensors [paper. p245]
- 美国:Line of Sight [paper]
- Today:GNSS + CDGPS(~10cm精度,最高达~1cm) + VBN
VBN
- pnp -> 6DoF
- 有源照明信标(LEDs):4个共面可见LED + 1个红外
- 无源:
- \[问题\ \left\{\begin{aligned} &EKF:视觉传感器存在噪声 \\ &计算量大\\ \end{aligned} \right.\]
- TRIAD / QUEST算法
- ATV方案限制:相对姿态和LoS角很小
proposed method
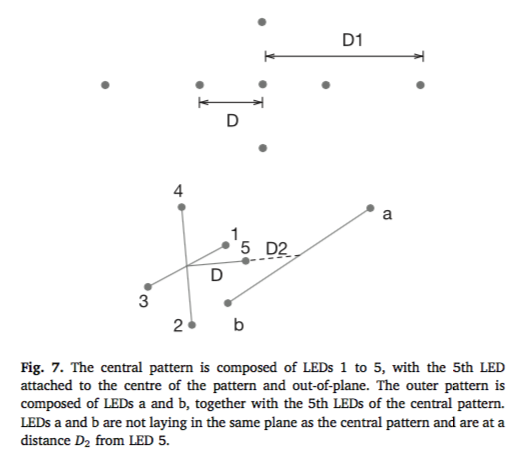
- 十字LED图案
- 可直接用于EKF,无需非线性求解/TRIAD/QUEST算法
- 可求解析解,获得确定解
- 适用于任何相对旋转/平移
Rendezvous scenario and docking requirements
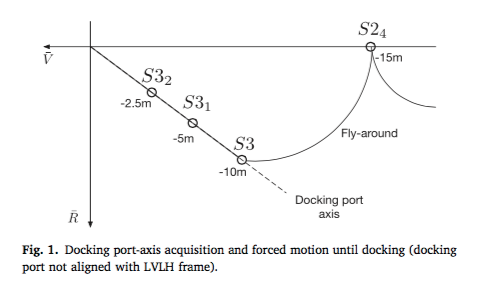
- S24处:本体坐标系与轨道坐标系对准。位置由CDGPS获得,角度依赖于恒星追踪器、6个太阳传感器、磁力计、三轴陀螺仪。
- S3处:CDGPS导航和VBN第一次切换(航天器尺寸较小,GNSS多径效应可忽略不计),在5m-2.5m范围内强制直线运动
Cooperative VBN
符号 + 参考系
参考系
- 惯性坐标系I:Earth-centred Inertial(ECI)frame
- 轨道坐标系o:LVLH frame(orbital frame)
动力学相关参考系
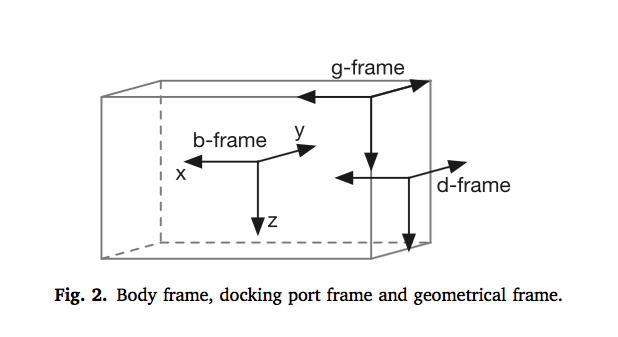
- 几何坐标系g:geometrical frame,固定在立方星上,通常位于顶点处
- 本体坐标系b:body frame,位于g中,原点在立方星质心,与卫星主惯性轴对齐
- d:docking port frame,位于g中,其位置由平移和旋转定义
- n:the frame used for the VBN,类似于d
相对动力学模型
- 推导耦合旋转/平移系统的非线形动力学模型,并将其线性化
- [paper]:线性耦合动力学,用于ATV和ISS的对接(由于在o参考系下,ISS的对齐和稳定性,其运动可通过谐波振荡器估算,该假设在立方星上无法应用,且不可能像ISS一样稳定)
姿态耦合
- 得到相对姿态状态空间模型
- 在轨道系下导出,并将其线性化
位置耦合
- 得到相对位置状态空间模型
测量方程
- 推导测量方程
- 对旋转、平移进行检测和校正
解析解
- LED1 LED2 LED3 LED4的对称性 -> 可得解析解
EKF
- 两种EKF:
- 10m - 5m处:外部LED + 中心LED + 星敏
- 5m - 对接:5个中心对称LED
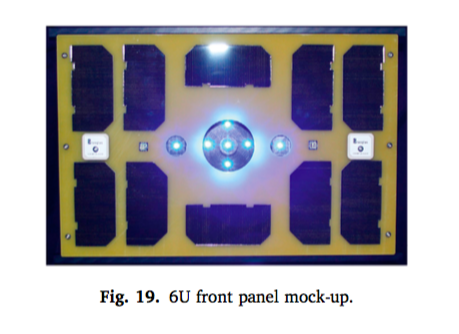
VBN硬件
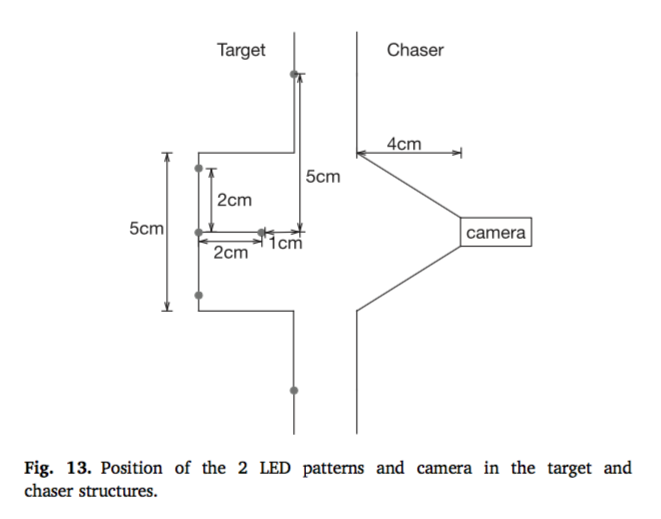
LED位置设计
- 外部LED尺寸应满足的需求:
- 适合于立方星表面(10cm x 10cm)
- 满足D1 = 5cm
- 内部LED尺寸应满足的需求:
- 5m处进行模式切换时,有足够高的精度
- 从5m至对接时,能观测到图案,且精度够高
- 不用鱼眼镜头
- 上述制约使得D = 2cm
- 内部LED放置在立方星内部3cm处
相机:
- 商业现货(COTS)硬件:COTS mono-chromatic Basler ACE camera acA3800-10 gm
- [官网链接]
- 分辨率:2764 x 3856 pixels
- 1 pixel size = 1.67um
- focal length = 4mm
- FoV约为60deg
- 放置在立方星内部4cm处
其它:
- 相机峰值量子效率 = 460nm,故选用蓝光LED(The camera sensor has its peak quantum efficiency at 460 nm. LEDs emitting in the blue part of the spectrum were thus selected. )
- 所选LED:峰值发射 = 470nm,视角 = 80deg,发光强度 = 1.2cd
- 相机上使用带通滤波片,使来自太阳的杂散光(stray light)最小
- 滤波片的峰值透射率 = 470nm
- 建议用单色相机
LED检测和跟踪
- 唯一视觉算法:MATLAB Blob analysis
- 在二进制图像上检测联通区域,提取质心
- 利用测量方程和导航滤波对LED进行主动跟踪(可定义ROI)
- 两种情况:
- VBN已收敛,其精度可以进行初始跟踪。n个LED,检测到m个连通区域(m > n),此时可利用EKF提供的每个LED的估计位置,计算该估计位置与连通区域位置的范数,选取最接近的连通区域。
- VBN未初始化或精度不达标。此时无法利用EKF进行主动跟踪,利用几何特征来解决。
几何特征
- 几何特征算法较简单,始终与EKF并行,提供LED检测的鲁棒性
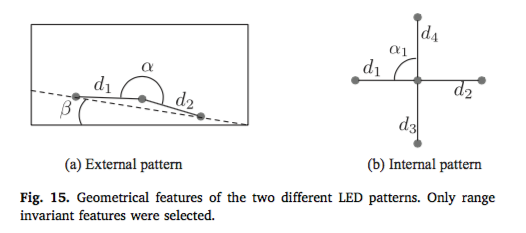
外部模式
- 角度:a接近180度;beta趋于0度
- 距离比:d1 / d2 = 1
- 额外特征:两个外部LED之间的像素距离(在5m处最大,10m最小)
内部模式
- 距离比:d1 / d2, d1 / d3, d2 / d4, d3 / d4
- 角度:a1, a2, a3, a4
- 最后采用(d1 + d2) / (d3 + d4) = 1