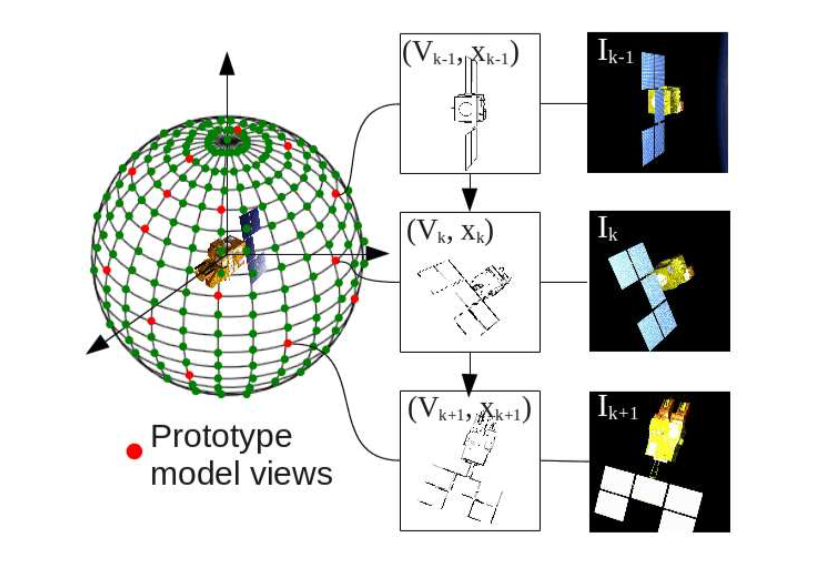
3D reconstruction roadmap Posted on 2020-11-17 \[\left\{\begin{aligned} &三维重建 \ \left\{\begin{aligned} &SfM(Stucture \ from \ Motion) \left\{\begin{aligned} &特征提取 \\ &关键点匹配 + 过滤 \\ &SfM \left\{\begin{aligned} &增量式(Incremental):openMVS、COLMAP\\ &全局式(Global) \\ &混合式(Hybrid) \\ &层次式(hierarchica) \\ \end{aligned} \right. \\ &BA(Bundle \ Adjustment)优化 \\ &MVS(Multiple \ View \ Stereo) \left\{\begin{aligned} &基于体素 \\ &基于点云扩散 \\ &基于深度图 \\ \end{aligned} \right. \\ \end{aligned} \right. \\ &立体视觉法 \left\{\begin{aligned} &双目\\ &多目 \\ \end{aligned} \right. \\ &RGB-D \\ \end{aligned} \right. \\ &SLAM \ \left\{\begin{aligned} &前端-视觉里程计 \\ &后端-非线性优化 \\ &回环检测 \\ &建图 \end{aligned} \right. \\ &Pose \ Estimation \ \left\{\begin{aligned} &坐标系(右手系) \left\{\begin{aligned} &目标世界坐标系:可辨识特征点的几何中心(通常选取3或4个)??? \\ &本体世界坐标系:原点为质心(坐标轴根据几何形状确定 / X轴为与地球中心连线的反向,Y轴为运动方向) \\ &相机坐标系 \\ &像素坐标系 \\ \end{aligned} \right. \\ &初始化 \left\{\begin{aligned} &由已有3D模型生成层次视图库(利用3D模型+虚拟摄像机生成 / 实拍) \\ &图像分割,提取二阶矩->估算质心、方向、面积 \\ &粒子滤波+贝叶斯框架->完成输入图像与3D模型生成视图的匹配,得到初始位姿 \\ \end{aligned} \right. \\ &位姿解算+跟踪 \left\{\begin{aligned} &匹配点搜索(多假设) \\ &减缓误匹配(全局优化 / GNN) \\ &多特征融合(特征点 + 边缘) \\ \end{aligned} \right. \\ \end{aligned} \right. \\ \end{aligned} \right.\] 参考: openMVS CMVS-PMVS awesome 3D Reconstruction