CNN经典操作
AlexNet, 2012
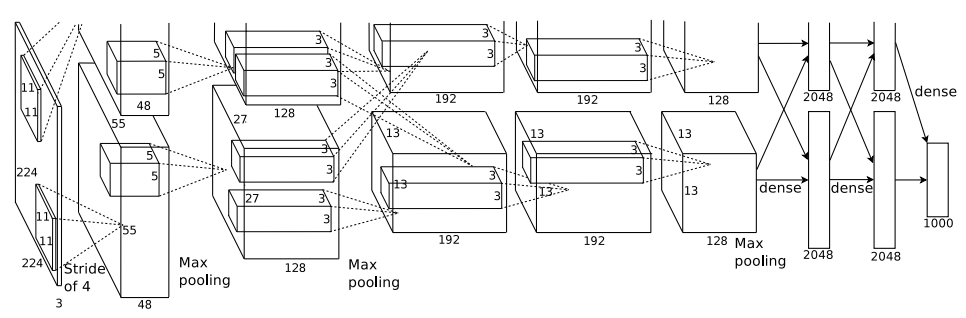
- group convolution
- dropout
- LBN
VGGNet, 2014
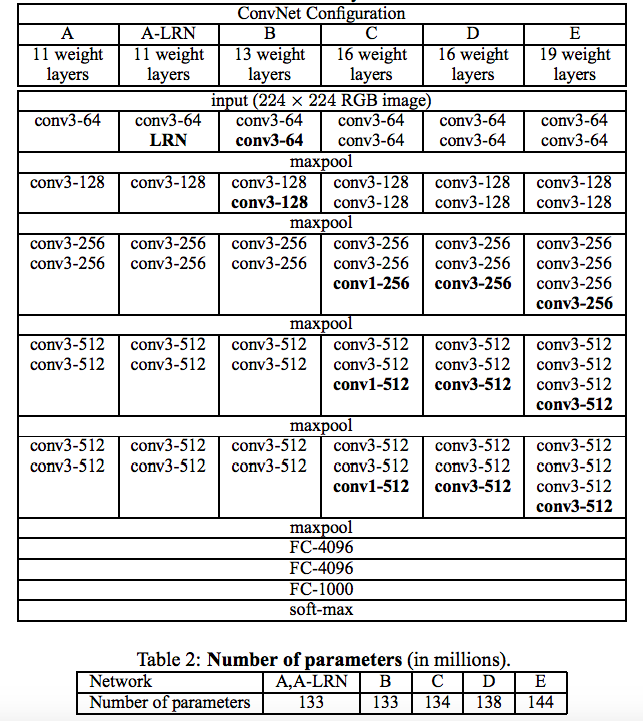
- 验证了
一. 刚体的三维目标跟踪
1. 3D-2D correspondence(3D模型 + 2D图像匹配)
1.1 基于标志物的三维跟踪
- 使用预先设计好的标志物,计算真实标志物和图像标志物的点对应关系,获得位姿
- 对硬件要求不高,鲁棒性强,实时、准确
- 需要增加额外的标志物,且要求标志物在整个跟踪过程中可见
- 参考文献1,1999年
1.2 基于特征的三维跟踪
- 只能应用于纹理信息丰富的物体
- SIFT、SURF、FAST等
- 参考文献1,2010年
1.3 基于模型的三维跟踪
- 针对无纹理或纹理信息较少的物体
- 需要预先建模物体的三维模型
- 基于边跟踪:使用边缘信息进行匹配,获得位姿
- 基于点云模型:利用ICP对场景点云和模型点云进行配准,获得位姿
- PAPiD方法:对齐边缘信息,复杂环境下不稳定(边缘与背景难以区分),1990年
- 直方图建模:独立考虑每一个点,忽略邻域点依赖关系,几何结构复杂物体跟踪失败,2014年
- 有向无环图 + 动态规划 + LM算法,2015年. 源代码C++
- 深度学习预测控制点在图像上的投影位置
2. 姿态求解、优化
- LM算法
- 李代数方法