基于视觉的三维跟踪
连续估计物体相对于相机的空间关系(旋转 + 平移)
1. 算法
1.1 基于标志物的三维跟踪
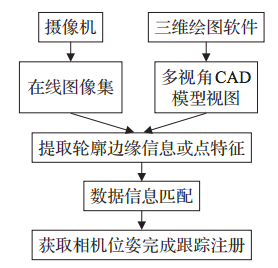
1.1.1 实现过程
1)预先在现实场景中设置好标志物
2)对图像中标志物进行识别,得到顶点信息
3)计算真实标志物和图像标志物中点的对应关系,求解位姿
1.1.2 优点
1)对硬件处理器要求不高
2)鲁棒性高,计算复杂度低,较好的实时性和准确性
1.1.3 缺点
1)需额外标志物,且要求标志物在整个跟踪过程中可见
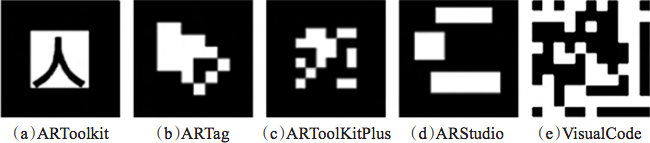
1.1.4 标志物
1.1.5 参考文献
1.2 基于特征的三维跟踪
1.2.1 实现过程
1)分别提取特征点/2D特征描述子
2)特征匹配,求解位姿
3)常用方法:SIFT / ORB / FAST / 光流等
1.2.2 限制
物体需有丰富的纹理特征
1.2.3 参考文献
1.3 基于模型的三维跟踪
- 针对无纹理或弱纹理的物体
- 需要预先建模物体的三维模型
1.3.1 基于边缘的方法
- 对边缘轮廓进行离散采样,投影,沿采样点法向搜索匹配点,求解位姿
- PAPiD方法:3D边缘采样,法向搜匹配点,鲁棒性较差(复杂环境下出现误匹配),1990年
- 直方图建模:独立考虑每一个点,忽略邻域点依赖关系,几何结构复杂物体跟踪失败,2014年
- 有向无环图 + 动态规划 + LM算法,2015年. 源代码C++
- 深度学习预测控制点在图像上的投影位置
1.3.2 基于区域的方法
- 基于前/背景分割
- PWP3D
2. 应用
- 空间应用(交会对接、在轨服务等)
- 机器人(抓取、装配等)
- AR / VR
3D跟踪实验室1
3D跟踪实验室2
秦学英 山大
blog
model-based tracking(PNP / KLT / EDGE)
位姿估计教程github.io