A review of edge-based 3D tracking of rigid objects(2019)
单目相机 + 有CAD模型 + 刚体 + 基于边缘的三维跟踪
参考文献Monocular Model-Based 3D Tracking of Rigid Objects: A Survey
1. overview
- 适用于弱纹理物体
- 可分为两类:不显式提取边缘的方法 + 显式提取边缘的方法
1.1 不显式提取边缘的方法
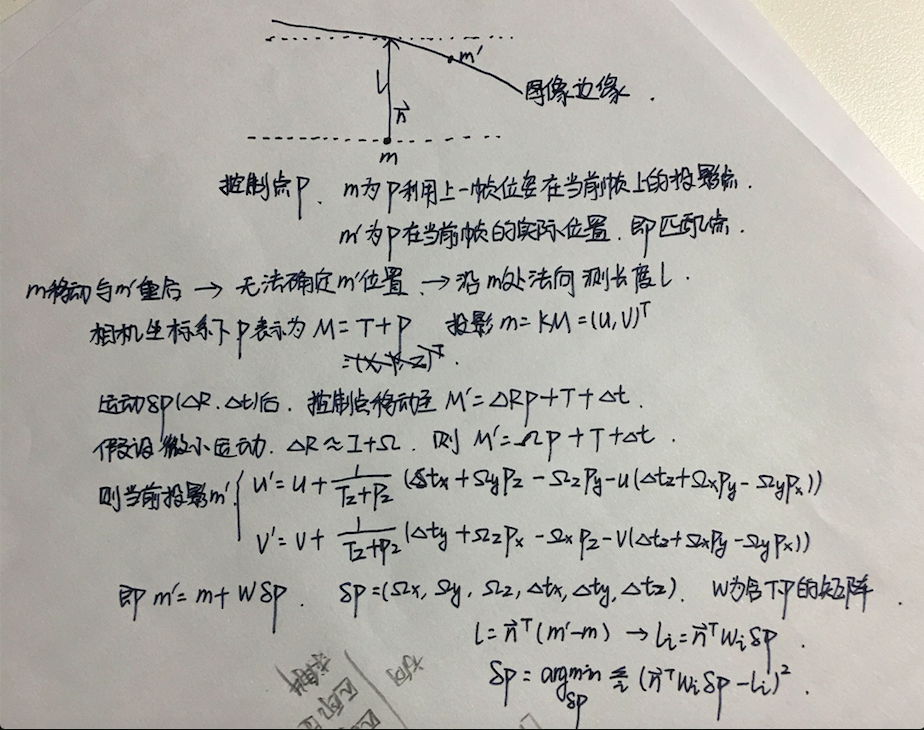
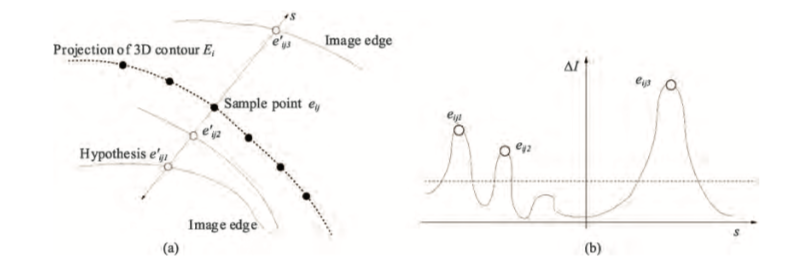
- 从3D模型边缘进行采样,产生控制点,投影,沿其法向依据梯度搜索匹配点,求解位姿
- 计算效率高
1.2 显式提取边缘的方法
- 直接提取边缘,进行边缘匹配,求解位姿
- 鲁棒性更强
2. 无显式边缘
2.1 RAPiD
第一个实时跟踪算法,1990
缺点
鲁棒性较差
1)梯度搜索中选最近的边缘点作为匹配点(复杂环境下,容易产生错误匹配)
2)假设微小运动,快速运动时精度明显下降
2.2 RAPiD改进

2.2.1 匹配点搜索
1)多假设:设定阈值,搜索线上的所有极值点都作为候选点
2.2.2 稳健估计(剔除误匹配的影响)
1)RANSAC
2)M-estimators
3)从CAD模型中移除被遮挡和不可见的边缘
2.2.3 贝叶斯估计(位姿优化)
1)卡尔曼滤波
2)粒子滤波
2.2.4 多特征融合
1)特征点 + 边缘(快速运动时鲁棒性较高)
3. 有显式边缘
利用马氏距离建立线的匹配关系