工业场景:由反射材料组成、无明显纹理特征,基于特征点的方法通常不适用
1. Architecture and Tracking Algorithms for a Distributed Mobile Industrial AR System(2007年)
分布式移动工业AR系统的体系结构和跟踪算法
overview
- 完成3D实时配准、跟踪
- 轻量级移动前端 + 后端计算服务器(利用WLAN连接)
- registration problem
2. Tracking of industrial objects by using CAD models(2007年)
使用CAD模型跟踪工业级对象
overview
- 实时相机位姿估计(工业场景)
- 使用线特征
- 将3D线模型投影到2D图像中,并通过最小化投影线和图像梯度的强最大值之间的误差来估计外部相机参数
3. Vision Based Navigation for Debris Removal Missions(2012年)
碎片清除任务中的视觉导航
overview
- 单目相机,完成位姿估计(卫星、着陆器等)
- 将3D模型的投影与2D图像配准 + 非线性优化
4. Vison-based Detection and Tracking for Space Navigation(2012年)
空间导航中基于视觉的检测与跟踪
overview
- 自主、非合作目标(卫星、航天器、碎片)
- 3D模型与2D图像进行边缘配准 + 非线性最小化处理
5. Vision-based navigation experiment onboard the removedebris mission(2017年)
清除碎片任务中的视觉导航试验
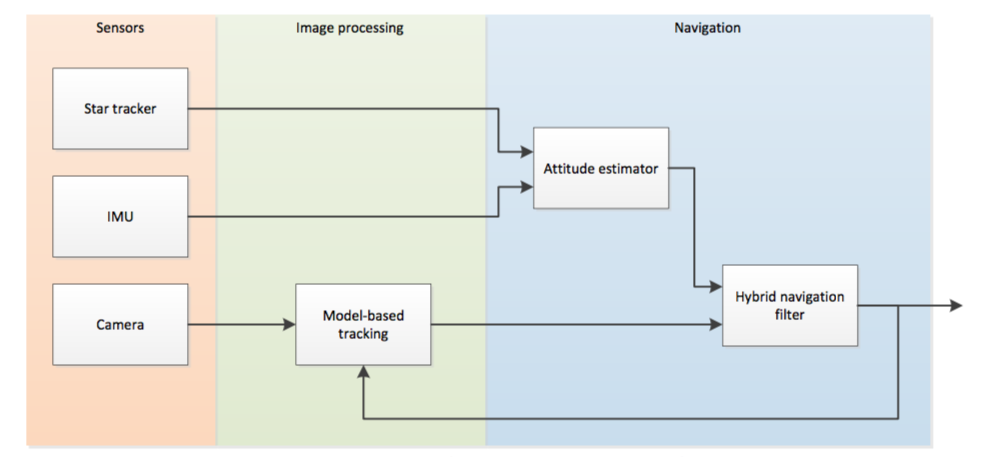
overview
- 非合作目标
- 3-DoF导航 方案:无源标准相机 + LOS估计 + EKF
- 6-DoF导航 方案1:LiDAR + IMU + EKF 方案2:无源标准相机 + 图像处理算法 + IMU + attitude sensing data
2D/3D matching

初始化
在图像序列中检测目标 + 提供跟踪的初始位姿
- 识别学习:将3D模型转为一系列各视角轮廓视图
- 在线目标检测:在图像中提取目标轮廓
- 在线匹配 + 姿态初始化:
跟踪
6. A review of edge-based 3D tracking of rigid objects(2019年)
刚体的基于边缘的3D跟踪综述