一. 特征检测和匹配
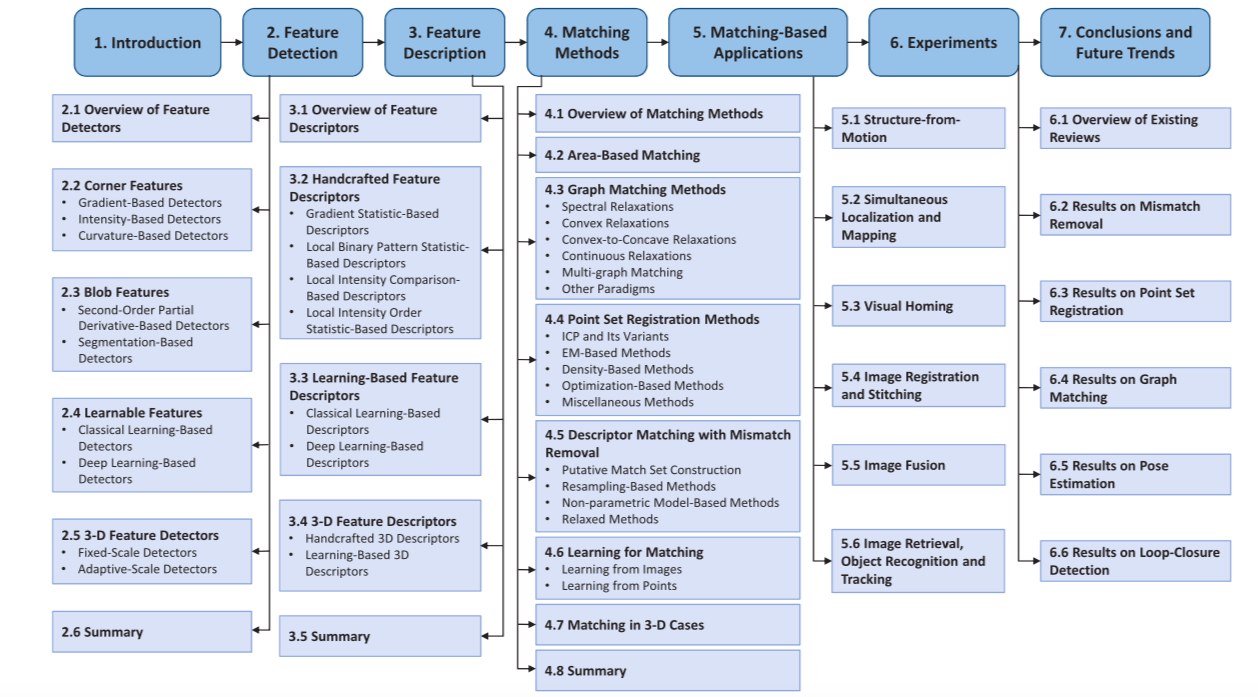
1. 关键点检测
不变性(光度、几何变化等)
1.1 角点特征检测(corner features)
- 通常被视为两条边的交点
- 常用方法:Harris / FAST等
1.2 斑点特征检测(blob features)
- 主要描述的是一个区域(i.e. 远看一棵树可作为一个斑点)
- 优点:稳定性更好;抗噪能力更强
- 常用方法:DoG / SIFT / SURF / KAZE等
1.3 基于学习的特征检测
- 独立算法较少见,一般与具体目标相结合训练网络
- TILDE:利用DoG生成训练集
- Quad-Networks:无监督学习
- Key.Net:从已生成的手工特征点进一步学习,提取更稳定的特征点
2. 特征描述
描述每个特征点周围的局部外观,具备不变性和可区分性
2.1 手工特征描述
- 常用方法:SIFT / BRIEF / ORB等
2.2 基于学习的特征描述
- 常用方法:L2Net / HardNet / PN-Net等
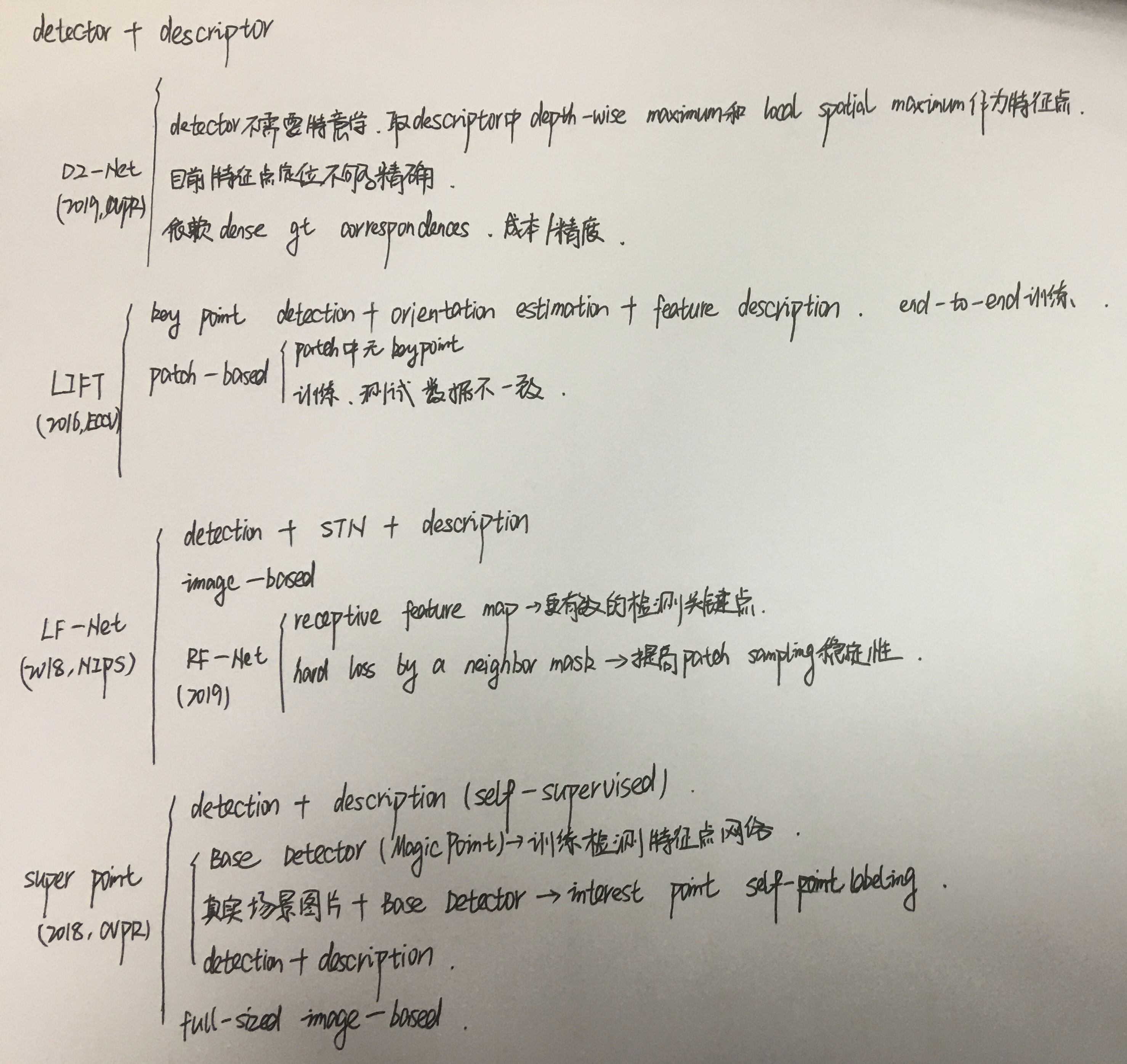
3 端到端(end to end)
- 论文合集
- [2020年,IJCV]综述:Image Matching from Handcrafted to Deep Features
- 中文综述:图像特征检测与匹配方法
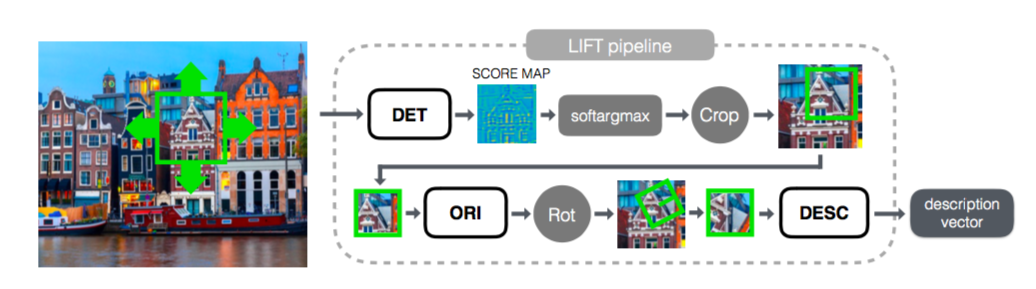
- [2016, ECCV] LIFT
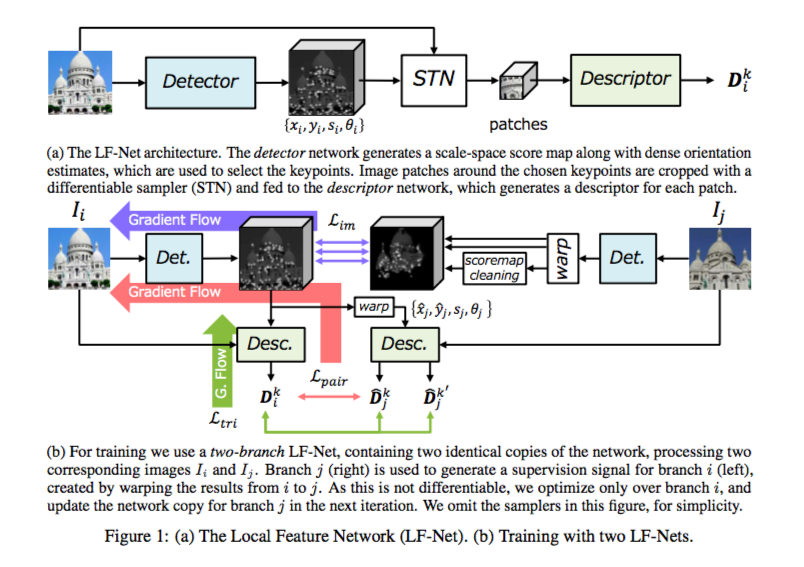
- [2018, NIPS] LF-Net
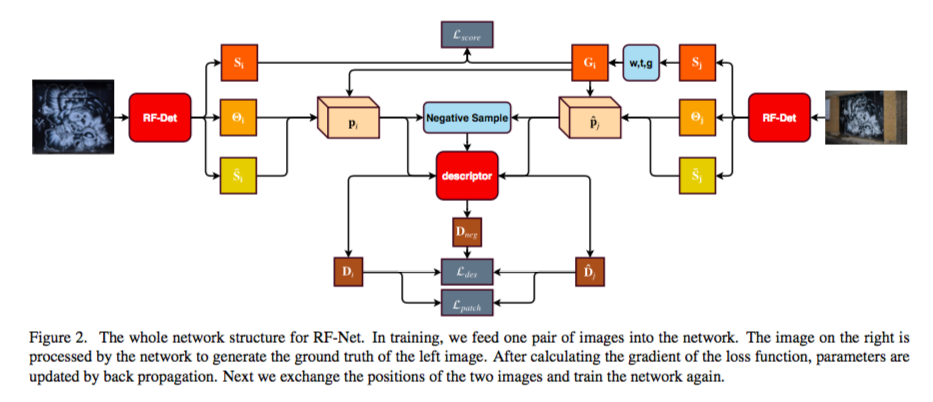
- [2019] RF-Net
- [2018, CVPR] Super Point
- [2019, CVPR] D2-Net
3. 关键点匹配
3.1 暴力匹配
- 距离选择
3.2 NN
- 近似匹配,加速
3.3 RANSAC
- 一致性优化算法
- 解决误匹配的问题
3.3 SuperGlue
- 利用GNN完成匹配
4. 应用
- SLAM
- SfM
- AR
- 图像检索
- 图像配准